مترجم: رضا محمدی
یک کنترل کننده عصبی کوچک که توسط محققان ساخته شده، قادر است روباتهای بیولوژیکی آینده را مثل سوسکهای سایبورگ که هم اکنون برای استفاده در عملیات امداد و نجات داخل ساختمانهای فروریخته تست میشوند، دقیقتر کنترل کند.
محققان دانشگاه کنتیکت بخش بزرگی از این دهه را برای پیدا کردن راهی برای متصل کردن سختافزار کامپیوتری کوچک شده به حشرات زنده صرف کردهاند تا بتوانند حرکت حشرات را کنترل کنند. این قابلیتها برای وزارت دفاع ایالات متحده امریکا و تیمهای امداد و نجات اهمیت دارد.
موفقیت در این زمینه محدود بوده و چندین چالش فنی هنوز رفع نشده است. این مشکلات از سختی بسیار زیاد ساخت سیستمهای روباتی در ابعاد بسیار کوچک و چالش برقراری رابطه بین سختافزار الکترونیکی و بافت عصبی بیولوژکی حشره به منظور شروع به حرکت نشئت میگیرد.
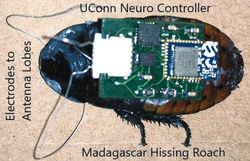
مدار کوچک کنترل عصبی که در UConn ساخته شده، قسمتی از کولهپشتی الکترونیکی کوچکی است که با اتصال سیم به لوب آنتن حشره بسته میشود. با ارسال بار الکتریکی اندک به بافت عصبی لوب آنتن چپ یا راست حشره، اپراتورها میتوانند به حشره اینگونه القا کنند که مانعی را شناسایی کرده و باعث شوند به سمت دیگری حرکت کند. ارسال بار به آنتن راست باعث میشود تا حشره به سمت چپ حرکت کند. همچنین ارسال بار به آنتن چپ موجب میشود تا به سمت راست حرکت کند. گرچه سیستمهای کنترلی مشابهی برای حشرات وجود دارد، اما آنچه کنترلر UConn را منحصر به فرد میکند این است که اپراتورها تا چه اندازه لوب آنتن حشره را توسط مدار کوچک چهار کاناله تحریک میکنند. این سیستم همچنین بازخورد بلادرنگی را از واکنش عصبی- ماهیچهای حشره به تحریک ارائه میدهد. این درجه از جزئیات باعث میشود نظارت و کنترل حرکت به راحتی انجام شود. این مزیتی است که محققان حشرات روباتی مدتها به دنبال آن بودهاند.
ارزش این کنترلر به دلیل واحد اندازهگیری اینرسی ۹ محوره دستگاه UConn است که شتاب خطی و چرخشی حشره را دنبال، جهت حرکت قطبنما را شناسایی میکند و دمای محیط اطراف حشره را اندازه میگیرد. قابلیت آخر اهمیت زیادی دارد، زیرا به گفته پژوهشگران، تستها نشان دادهاست دمای محیط در عملکرد برخی حشرات میزبان تأثیر بسزایی دارد.
اطلاعات گردآوری شده به وسیله مدار کوچک توسط یک آنتن بلوتوث به اپراتور دستگاه مخابره میشود. این سیگنال به راحتی با یک گوشی همراه معمولی شناسایی میشود. اپراتورها میتوانند به وسیله اطلاعاتی که از جهت حرکت، شتاب و دادههای دیگر دریافت میشود، مسیر حرکت حشره را استنتاج کرده و بر این اساس، میزان تحریک آنتن را تنظیم، تحریک مناسب را از راه دور به حشره ارسال و حشره را در جهت دلخواه هدایت کنند.
دوتا که در بهینهسازی سیستمهای کنترل و سیستمهای فیزیکی- سایبری تخصص دارد، برای تست کنترلر جدید، دستگاه را به سوسک هیسینگ ماداگاسکار نصب کرد. آزمایشها نشان داد که سوسک هنگام تحریک لوب آنتن راست، به سمت چپ و هنگام ارسال بار کم الکتریکی به آنتن چپ، به سمت راست حرکت میکند.
یک نکته جالب که محققان مشاهده کردند این بود که شدت حرکت سوسک به سمت چپ یا راست بعد از تحریک اول کاهش یافت، یعنی اگر سوسک بعد از اولین ضربان الکتریکی به آنتن راست به شدت به سمت چپ حرکت کند، در ضربانهای الکتریکی بعدی به آن لوب، حرکت سمت چپ آن شدت کمتری خواهد داشت.
منبع:ساینس دیلی